LAMP
Lensless Actinic Metrology for EUV Photomasks
Abstract
Extreme ultraviolet (EUV) photomask inspection is a critical step in semiconductor manufacturing, requiring high-resolution, high-throughput solutions to detect nanometer-scale defects. Traditional actinic imaging systems relying on complex optics have a high cost of ownership and require frequent upgrades. An alternative is lensless imaging techniques based on ptychography, which offer high-fidelity reconstruction but suffer from slow throughput and high data demands. In particular, the ptychographic standard solver—the iterative Difference Map (DifMap) algorithm—requires many measurements and iterations to converge. We propose Ptycho-LDM, a hybrid framework integrating DifMap with a conditional Latent Diffusion Model for rapid and accurate phase retrieval. Ptycho-LDM alleviates high data acquisition demand by leveraging data-driven priors while offering improved computational efficiency. Our method performs coarse object retrieval using a resource-constrained reconstruction from DifMap and refines the result using a learned prior over photomask patterns. This prior enables high-fidelity reconstructions even in measurement-limited regimes where DifMap alone fails to converge. Experiments on actinic patterned mask inspection (APMI) show that Ptycho-LDM recovers fine structure and defect details with far fewer probe positions, surpassing the DifMap in accuracy and speed. Furthermore, evaluations on both noisy synthetic data and real APMI measurements confirm the robustness and effectiveness of Ptycho-LDM across practical scenarios. By combining generative modeling with physics-based constraints, Ptycho-LDM offers a promising scalable, high-throughput solution for next-generation photomask inspection.
People
Collaborators

Suman pursued his doctoral studies in the Visual Artificial Intelligence Laboratory at Oxford Brookes University, United Kingdom, focusing on spatiotemporal human action localization using deep learning techniques. Suman received a Ph.D. in Computer Science and Mathematics from Oxford Brookes University in 2017. He served as a postdoctoral fellow at Oxford Brookes University between December 2017 and July 2018. Then he moved to CVL (Computer Vision Lab) at ETH Zurich, holding a postdoctoral researcher position until June 2023. Suman's research has centered around unsupervised domain adaptation (UDA) for visual scene understanding (semantic and panoptic segmentation), human behavior understanding, and vision-based biometrics (face anti-spoofing). He also worked on semi-supervised learning for semantic segmentation by leveraging self-supervised depth estimation. His internship at Disney Research Zurich involved designing deep generative models for unsupervised facial expression learning. Additionally, Suman tackled research problems in multi-task learning (MTL) by addressing two common challenges in developing multi-task models, incremental learning and task interference.

Luis Barba Flores joined the SDSC in 2022 as Senior Data Scientist. He received a joined PhD in Computers Science in 2016 from the Université Libre de Bruxelles and Carleton University. He served as a postdoctoral researcher at ETH Zurich from 2016 to 2019, and then moved to EPFL Lausanne to work in the Machine Learning and Optimization Group until 2022. His research interests include distributed optimization algorithms, first-order optimization methods and their applications to Deep Learning models.

Benjamín Béjar received a PhD in Electrical Engineering from Universidad Politécnica de Madrid in 2012. He served as a postdoctoral fellow at École Polytechnique Fédérale de Lausanne until 2017, and then he moved to Johns Hopkins University where he held a Research Faculty position until Dec. 2019. His research interests lie at the intersection of signal processing and machine learning methods, and he has worked on topics such as sparse signal recovery, time-series analysis, and computer vision methods with special emphasis on biomedical applications. Since 2021, Benjamin leads the SDSC office at the Paul Scherrer Institute in Villigen.
PI | Partners:
description
Motivation
Extreme Ultraviolet (EUV) lithography has become the foundation of advanced semiconductor device manufacturing, enabling the continuation of Moore’s law through the use of 13.5 nm wavelength light. While this shorter wavelength makes it possible to achieve the resolution required for next-generation technology nodes, it also significantly raises the cost and complexity of the lithography infrastructure. In particular, actinic photomask inspection—ensuring that EUV masks are free of nanoscale defects—remains a critical bottleneck. Conventional imaging-based inspection systems rely on sophisticated optics that must operate at EUV wavelengths. These systems are expensive to build, require regular upgrades to keep pace with scaling demands, and are difficult to deploy cost-effectively at scale. As an alternative, lensless imaging methods such as ptychography have emerged. They offer high-fidelity reconstructions without the need for imaging optics, making them attractive for EUV inspection. However, their practical use is hindered by two major challenges: (i) ptychography requires dense scanning with large overlap between probe positions, leading to long acquisition times and substantial data storage requirements, and (ii) standard iterative solvers such as Difference Map (DifMap) converge slowly, needing many iterations to achieve accurate reconstructions. These limitations make it impractical to use ptychography directly for high-throughput mask inspection. Therefore, there is a strong need for novel computational frameworks that retain the reconstruction fidelity of ptychography while drastically reducing its data acquisition demands and computational burden. Developing such a cost-effective and scalable solution for EUV mask inspection would not only lower infrastructure costs but also have a substantial impact on the reliability and pace of future semiconductor technology development.
Proposed Approach | Solution
We introduce Ptycho-LDM, a hybrid deep learning-based framework for efficient and accurate phase retrieval of EUV photomasks. The framework integrates a physics-informed ptychographic reconstruction with a conditional Latent Diffusion Model (LDM), a generative model capable of refining reconstructions in a low-dimensional latent space. Unlike traditional DifMap solvers, which require many probe positions and iterations, our method uses a two-step strategy. First, we obtain a coarse spatial reconstruction through a resource-constrained DifMap run, using fewer probe positions and iterations. This initial reconstruction captures the broad structure of the photomask but lacks fine details. In the second step, Ptycho-LDM refines this coarse reconstruction by leveraging the generative prior of the LDM, trained to model the distribution of photomask patterns. Working in latent space allows the model to add missing structural details with high computational efficiency, reducing both inference time and memory requirements. This hybrid strategy combines the strengths of physics-based and data-driven approaches: the ptychographic step ensures physical consistency with the diffraction data, while the diffusion prior contributes domain-specific knowledge to improve reconstruction quality. As a result, Ptycho-LDM is able to deliver high-fidelity reconstructions even in measurement-limited regimes where DifMap alone fails to converge.
Contributions
Our work makes the following key contributions:
- We propose Ptycho-LDM, a novel hybrid framework that integrates DifMap with a conditional Latent Diffusion Model for EUV photomask phase retrieval, enabling fast and accurate reconstructions.
- We demonstrate that Ptycho-LDM achieves high-quality results with significantly fewer probe positions and iterations, offering substantial improvements in both throughput and computational efficiency.
- Experiments on both noisy synthetic data and real actinic patterned mask inspection (APMI) measurements confirm the robustness of the approach, recovering fine structure and nanometer-scale defects beyond the capability of DifMap alone.
By combining generative modeling with physics-based priors, we set a new benchmark for scalable, high-throughput EUV mask inspection, while also establishing a framework that can be extended to other ptychographic imaging applications such as ptycho-tomography.

Figure 1: (a) Existing ptychographic algorithms, such as Difference Map [3], require significantly longer reconstruction times due to two primary computational bottlenecks: the number of iterations (K) needed for Fourier and complex object updates, and the number of probe positions (J) required to acquire a sufficient number of diffraction patterns for high-quality phase retrieval. (b) In contrast, our proposed Ptycho-LDM achieves significantly faster reconstruction by leveraging the state-of-the-art generative capabilities and faster sampling of conditional Latent Diffusion Models (LDMs), seamlessly integrated with a physics-based ptychographic iterative approach. Most importantly, the proposed Ptycho-LDM framework requires significantly fewer probe positions, enabling much faster and high-quality image reconstruction.
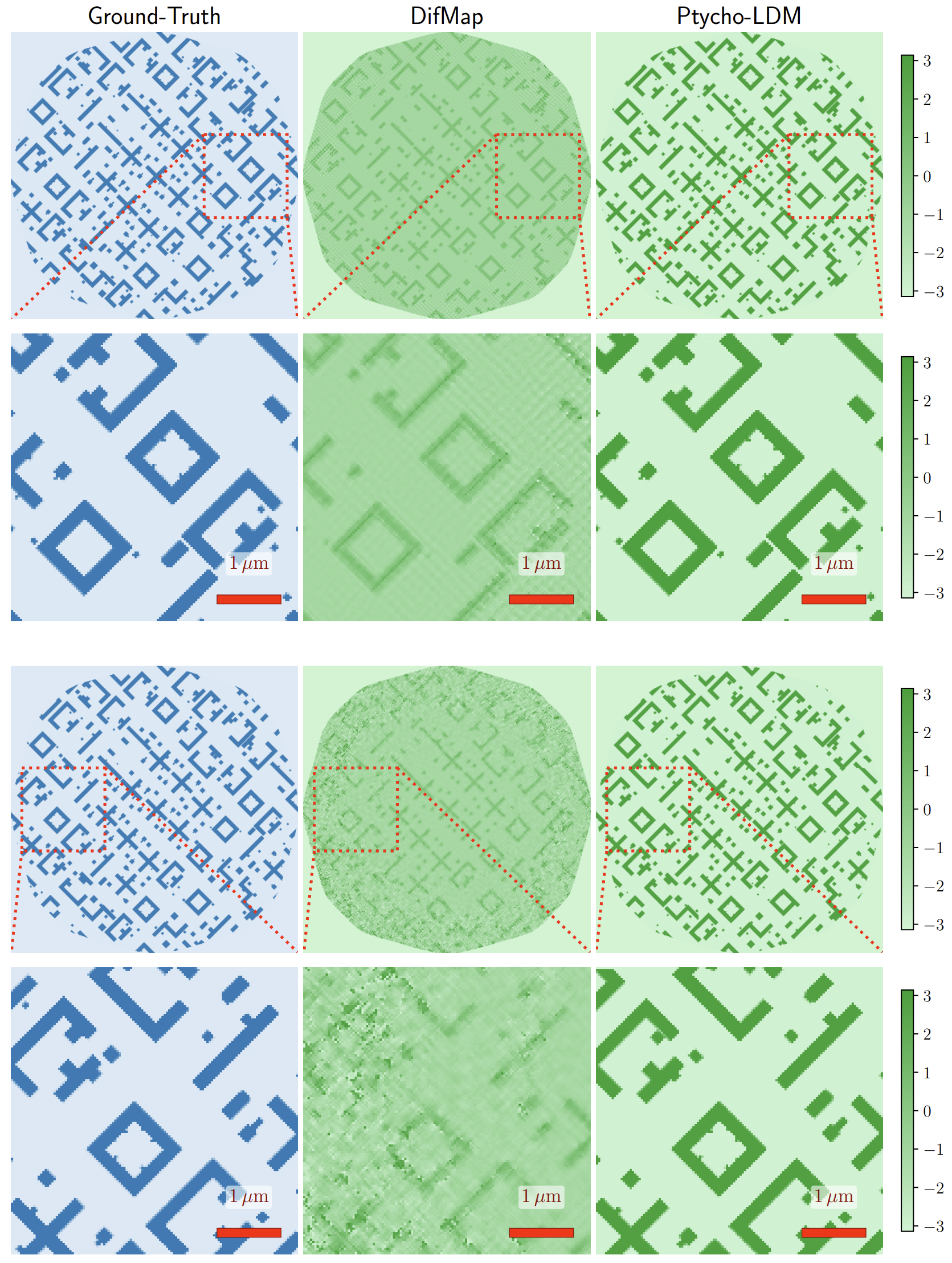
Figure 2: Qualitative comparison of the reconstructed photomask (masked region for evaluation). The first and third rows show the ground-truth (left, blue colormap), Difference Map (center, green colormap), and our proposed Ptycho-LDM reconstructions (right, green colormap). The second and fourth rows show the magnified views of the rectangular regions highlighted in the first and third rows, respectively. The first and second rows show reconstructions from noise-free measurements (diffraction patterns), while the third and fourth rows present reconstructions from noisy measurements both for DifMap and Ptycho-LDM (w/ Noise, w/ Training). Despite conditioning on noisy measurements, Ptycho-LDM achieves higher-quality reconstructions compared to the DifMap baseline. Both the Difference Map and Ptycho-LDM use 5 probe positions and 1000 iterations.
Impact
The impact of this work lies in enabling a practical and scalable pathway for next-generation EUV photomask inspection. By integrating physics-based ptychographic reconstruction with conditional latent diffusion models, Ptycho-LDM delivers high-fidelity defect detection with substantially fewer probe positions and iterations. This directly reduces data acquisition time and computational demand, addressing two of the most critical barriers to the adoption of ptychography in semiconductor metrology. In doing so, the framework not only lowers infrastructure costs but also supports higher throughput and faster inspection cycles—capabilities essential for keeping pace with shrinking technology nodes. More broadly, the combination of generative modeling and physics-informed algorithms introduces a new paradigm for semiconductor inspection, one that is robust to noise, adaptable to real-world measurements, and extensible to other imaging modalities.
Presentation
Gallery
Annexe
Publications:
- Saha, S., Ansuinelli, P., Barba, L., Mochi, I., & Haro, B. B. (2025, September). Ptycho-LDM: A Hybrid Framework for Efficient Phase Retrieval of EUV Photomasks Using Conditional Latent Diffusion Models. In Photonics (Vol. 12, No. 9, p. 900). MDPI.
- Ansuinelli, P., Saha, S., Flores, L. F. B., Haro, B. B., Ekinci, Y., & Mochi, I. (2025). Prior–primed deep neural network based EUV mask inspection. Optics Express, 33(6), 12572-12590.
Additional resources
Bibliography
- Bunday, B. D., Bello, A., Solecky, E. & Vaid, A. 7/5nm logic manufacturing capabilities and requirements of metrology in Metrology, Inspection, and Process Control for Microlithography XXXII (eds Adan, O. & Ukraintsev, V. A.) 10585 (SPIE, Mar. 2018), 17. isbn: 9781510616622. https://www.spiedigitallibrary.org/conference- proceedings- of- spie/10585/2296679/75nm- logic-
manufacturing-capabilities-and-requirements-of-metrology/10.1117/12.2296679.full. - Miyai, H., Kohyama, T., Suzuki, T., Takehisa, K. & Kusunose, H. Actinic patterned mask defect inspection for EUV lithography in Photomask Technology 2019 (eds Rankin, J. H. & Preil, M. E.) 11148 (SPIE, 2019), 162–170. https://doi.org/10.1117/12.2538001.
- Thibault, P., Dierolf, M., Bunk, O., Menzel, A. & Pfeiffer, F. Probe retrieval in ptychographic coherent diffractive imaging. Ultramicroscopy 109, 338–343 (2009).
- Gardner, D. F. et al. High numerical aperture reflection mode coherent diffraction microscopy using off-axis apertured illumination. Optics Express 20. issn: 1094-4087 (2012).
- Harada, T., Nakasuji, M., Nagata, Y., Watanabe, T. & Kinoshita, H. Phase imaging of EUV masks using a lensless EUV microscope in (ed Kato, K.) 8701 (International Society for Optics and
Photonics, June 2013), 870119. http : / / proceedings. spiedigitallibrary . org / proceeding . aspx?doi=10.1117/12.2027283. - RESCAN: an actinic lensless microscope for defect inspection of EUV reticles
I. Mochi, P. Helfenstein, I. Mohacsi, R. Rajeev, D. Kazazis, S. Yoshitake, and Y. Ekinci
J. Micro/Nanolith. MEMS MOEMS 16(4), 041003 (2017)
doi: 10.1117/1.JMM.16.4.041003 - Scanning coherent diffractive imaging methods for actinic EUV mask metrology
P. Helfenstein, I. Mohacsi, R. Rajendran, and Y. Ekinci
J. Micro/Nanolith. MEMS MOEMS 15(3), 034006 (2016)
doi: 10.1117/1.JMM.15.3.034006
Publications
Related Pages
More projects

ACROSS

Dedgeflow

CHUV: Heracles - Sepsis Model

AI-Driven Political Monitoring
More projects
News
Latest news

SDSC and PSI teams jointly explore the AI potential of large-scale infrastructures
SDSC and PSI teams jointly explore the AI potential of large-scale infrastructures

Coding the Future: Energy Data Hackdays Expand to French-speaking Switzerland
Coding the Future: Energy Data Hackdays Expand to French-speaking Switzerland

Science des données : le SDSC et le Canton de Vaud soutiennent quatre projets appliqués
Science des données : le SDSC et le Canton de Vaud soutiennent quatre projets appliqués
Contact us
Let’s talk Data Science
Do you need our services or expertise?
Contact us for your next Data Science project!